 |
QP
0.7-SNAPSHOT
Control software for the ??SRT telescope
|
|
QP
0.7-SNAPSHOT
Control software for the ??SRT telescope
|
The Schedule class represents a planned rotation of the telescope. More...
#include <state.h>
Public Member Functions | |
| virtual ms_t | step (double current_phi, double current_theta, ms_t t)=0 |
| Update the schedule with the current position of the system. More... | |
| double | phidot (void) const |
| Obtain the suggested azimuthal angular speed. More... | |
| double | thetadot (void) const |
| Obtain the suggested altitudinal angular speed. More... | |
Protected Attributes | |
| double | phidot_ |
| Suggested rate of change of phi (azimuthal coordinate, rad/s) | |
| double | thetadot_ |
| Suggested rate of change of theta (altitude coordinate, rad/s). More... | |
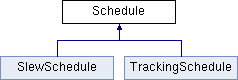
The Schedule class represents a planned rotation of the telescope.
This can be either a slew from one position directly to another (which will typically happen by a great-circle route) or it will generate the rotations to track an object across the celestial sphere (typically along a small circle).
|
inline |
Obtain the suggested azimuthal angular speed.
The speed is positive for clockwise rotations about the zenith.
|
pure virtual |
Update the schedule with the current position of the system.
Step the schedule to the given time
| current_phi | the current pointing of the system (azimuth, rad) |
| current_theta | the current pointing of the system (altitude, rad) |
| t | the current time |
Implemented in TrackingSchedule, and SlewSchedule.
|
inline |
Obtain the suggested altitudinal angular speed.
The speed is positive for rotations towards the zenith.
|
protected |
Suggested rate of change of theta (altitude coordinate, rad/s).
Thus this is positive for rotations towards from the zenith.
 1.8.8
1.8.8

